Teorema de Stokes

O Teorema de Stokes, na geometria diferencial, é uma afirmação sobre a integração de formas diferenciais que generaliza diversos teoremas do cálculo vetorial. Além disso, possui aplicações importantes no estudo dos campos vetoriais, especialmente na análise do movimento de rotação dos fluidos. É assim chamado em homenagem ao matemático George Gabriel Stokes (1819-1903), embora a primeira referência conhecida do resultado seja por William Thomson (Lord Kelvin) e apareça em uma carta dele para Stokes, datada de 2 de julho de 1850.[1][2] Quando a superfície é plana, o Teorema de Stokes cai em uma forma particular conhecido como Teorema de Green.
Introdução
O teorema fundamental do cálculo estabelece que a integral de uma função f sobre um intervalo [a, b] pode ser calculada através da busca de uma antiderivada F de f:

O teorema de Stokes é uma grande generalização deste teorema no seguinte sentido.
- Por uma escolha de F, . Na linguagem das formas diferenciais, isto é dizer que f(x) dx é a derivada exterior da 0-forma, isto é função, F: em outras palavras, que dF = f dx. O teorema geral de Stokes se aplica a formas diferenciais superiores em vez de F.
- Um intervalo [a, b] é simplesmente um exemplo de uma variedade unidimensional com bordo. Seu bordo é o conjunto que consiste dos dois pontos a e b. A integração de f sobre o intervalo pode ser generalizada para a integração de formas sobre variedades de dimensões maiores. Duas condições técnicas são necessárias: a variedade tem que ser orientável, e a forma tem que ter suporte compacto para que a integral resultante esteja bem definida.
- Os dois pontos a e b formam o bordo do intervalo aberto. De forma mais geral, o teorema de Stokes se aplica a variedades orientadas M com bordo. A fronteira ∂M de M é ela mesma uma variedade e herda uma orientação natural daquela da variedade. Por exemplo, a orientação natural do intervalo fornece uma orientação dos pontos da fronteira. Intuitivamente, a herda a orientação oposta de b, uma vez que são extremos opostos do intervalo. Então, "integrar" F sobre os pontos a e b da fronteira é tomar a diferença F(b) − F(a).


Assim o teorema fundamental pode ser lido como:
![{\displaystyle \int _{[a,b]}f(x)\,dx=\int _{[a,b]}dF=\int _{\{a\}^{-}\cup \{b\}^{+}}F=F(b)-F(a).}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7ecc27c50a3eee3e1dbd514e64079fc0943194ec)
Formulação geral
Seja uma variedade suave orientada de dimensão n e seja uma n-forma diferencial compactamente suportada em . Primeiramente, suponha que α tem suporte compacto no domínio de uma única carta orientada {,}. Neste caso, define-se a integral de sobre como sendo





isto é, via um pullback de α para Rn.
Mais geral, integral de sobre é definida como segue: seja {} uma partição da unidade associada a uma cobertura localmente finita {,} de cartas (orientadas de modo consistente), então defina a integral




onde cada termo da soma é avaliado através do pullback para Rn como descrito acima. Esta quantidade é bem definida, ou seja, não depende da escolha das cartas, nem da partição da unidade.
O teorema de Stokes diz: Se é uma (n − 1)-forma com suporte compacto em e denota a fronteira de com sua orientação induzida, então



Aqui é a derivada exterior, que é definida usando apenas a estrutura de variedade. No lado direito, as vezes se utiliza um circulo dentro do sinal da integral para enfatizar o fato de que a (n-1)-forma é fechada.[3] O lado direito da equação é usado frequentemente para formular leis integrais; o lado esquerdo leva então a uma formulação diferencial equivalente (ver abaixo).

O teorema é usado com frequência em situações nas quais é uma subvariedade orientada mergulhada de uma variedade maior na qual a forma está definida.
Uma demonstração é particularmente simples se a variedade for uma assim conhecida "variedade normal", como na figura do lado direito, que pode ser segmentada em faixas verticais (por exemplo paralelas a direção xn) , tais que depois de uma integração parcial em relação a esta variável, contribuições não triviais vem apenas das superfícies das fronteiras superior e inferior (pintadas em amarelo e vermelho, respectivamente), onde as orientações mutuamente complementares são visíveis através das setas.
Casos especiais
Teorema de Kelvin-Stokes


Este é um caso 1+1 dimensional dualizado, para uma 1-forma (dualizado porque ele é uma afirmação sobre campos vetoriais). É comum se referir a este caso especial apenas como teorema de Stokes em muitos cursos universitários introdutórios de cálculo vetorial. Ele também é chamado as vezes de teorema do rotacional.
O teorema de Kelvin-Stokes clássico diz-nos que:

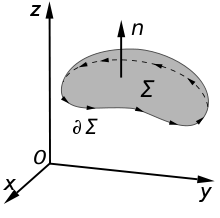
que relaciona a integral de superfície do rotacional de um campo vetorial numa superfície Σ no espaço tridimensional euclidiano à integral de linha do campo vetorial sobre sua fronteira, é um caso especial do teorema generalizado de Stokes (com n = 2) uma vez que se identifica um campo vetorial com uma 1-forma usando a métrica do espaço euclidiano. A curva da integral de linha, , deve ter orientação positiva, de modo que aponta no sentido anti-horário quando a normal da superfície, , aponta em direção ao observador, seguindo a regra da mão direita.



Uma consequência da fórmula é que as linhas de campo de um campo vetorial com rotacional nulo não podem ter contorno fechado.
A fórmula pode ser escrita como:


em que P, Q e R são as componentes de F.
Estas variantes também são usadas com frequência:




Teorema de Green
A relação entre teorema de Green e Teorema de Stokes pode ser demonstrado abaixo:
Considerando um campo vetorial , em um contorno fechado C.

De acordo com Teorema de Stokes : A Integral seria : .


Desse modo a integral seria : = que é exatamente igual o Teorema de Green.


Dessa forma, demonstrou-se que o Teorema de Green é um caso especial do Teorema de Stokes.
No eletromagnetismo
Duas das quatro equações de Maxwell envolvem ondulações de campos vetoriais 3-D, e suas formas diferenciais e integrais são relacionadas pelo teorema de Kelvin-Stokes. Deve ter tomado cuidado para evitar casos com limites de movimento: os derivados de tempo parcial destinam-se a excluir tais casos. Se forem incluídos limites de mudança, o intercâmbio de integração e diferenciação introduz termos relacionados com o movimento de contorno não incluído nos resultados abaixo:
| Nome | Forma diferencial | Forma integral (usando o teorema de Kelvin-Stokes mais invariância relativística, ∫ ∂/∂t … → d/dt ∫ …) |
|---|---|---|
| Equação Maxwell-Faraday |  |  (com C e S não necessariamente estacionário) |
| Lei de Ampère (com a extensão de Maxwell): |  |  (com C e S não necessariamente estacionário) |
O subconjunto de equações de Maxwell listado acima é válido para campos eletromagnéticos expressos em unidades SI. Em outros sistemas de unidades, como CGS ou unidades gaussianas, os fatores de escala para os termos diferem. Por exemplo, em unidades gaussianas, a lei de indução de Faraday e a lei de Ampère assumem as formas:  respectivamente, onde c é a velocidade da luz no vácuo.
respectivamente, onde c é a velocidade da luz no vácuo.
Aplicações
O Teorema de Stokes possui diversas aplicações nos campos científicos. Um de seus principais usos é - em utilização conjunta com o Teorema da Divergência de Gauss - a passagem da forma integral para a forma diferencial das equações de Maxwell. A notação diferencial é muito importante para o estudo do eletromagnetismo de modo mais avançado, sendo muito utilizada neste ramo da física. Será mostrada como a forma diferencial é obtida porém, antes, serão recordadas as formas integrais das equações de Maxwell.
Equações de Maxwell na forma integral
1ª) Lei de Gauss da Eletricidade
, relaciona o fluxo elétrico resultante com a carga envolvida pela superfície;

2ª) Lei de Gauss do Magnetismo
, constata a inexistência de monopólos magnéticos;

3ª) Lei de Faraday
, relaciona a força eletromotriz com a taxa de variação do fluxo magnético no tempo;

4ª) Lei de Ampère-Maxwell
, relaciona o campo magnético induzido à corrente elétrica e à variação de fluxo elétrico no tempo (corrente de deslocamento).

Notação utilizada em Fundamentals of Physics by Halliday, Resnick, Walker (Fifth Edition). Onde,
: carga elétrica.

: campo elétrico.

: diferencial do comprimento de arco na direção da reta tangente.

B, E: fluxos magnético e elétrico, respectivamente.

: corrente elétrica.

: campo de indução magnético.

: , é o vetor normal unitário à superfície diferencial de área.



Equações de Maxwell na forma diferencial
1ª) Lei de Gauss da Eletricidade
;

2ª) Lei de Gauss do Magnetismo
;

3ª) Lei de Faraday
;

4ª) Lei de Ampère-Maxwell
;

Dedução das equações de Maxwell na forma diferencial
A 1ª equação diferencial é obtida usando o Teorema da Divergência na forma integral da Lei de Gauss, lembrando ainda que a carga deve ser expressa em termos da densidade de cargas como

.

Aplicando essa notação na primeira equação de Maxwell, obtém-se



Igualando-se os integrandos das integrais de volume, obtemos a 1ª equação de Maxwell na forma diferencial:
.
É interessante relacionar a existência de com a existência de fontes, o que respeita a equação da continuidade.

Usando agora o Teorema da Divergência na forma integral da 2ª equação de Maxwell, e lembrando que ela expressa a ausência de fluxo magnético através de uma superfície fechada, a forma diferencial é dada simplesmente por
o que expressa matematicamente o fato de que até hoje não foram encontrados na natureza monopólos magnéticos.
Para obter a 3ª equação na forma diferencial, usaremos o Teorema de Stokes e assumiremos que as variáveis temporal e espacial dos campos são independentes. Partimos da Lei de Faraday na forma integral, onde o fluxo magnético através de uma superfície aberta é dado por
.

Assim,
,

onde a última igualdade expressa a independência entre a variável temporal e a varável espacial. Comparando o lado esquerdo da expressão com a última igualdade da direita conclui-se que, como as integrais de superfície são iguais, seus integrandos também o são, isto é:
.
Assim, o campo elétrico será um campo de vórtice (ou seja, possuirá rotacional diferente de zero e será um campo não conservativo) desde que o campo de indução magnética varie com o tempo. Caso contrário, o campo elétrico poderá ser considerado um campo conservativo/gradiente/potencial.


O procedimento para deduzir a 4ª equação de Maxwell é análogo ao já aqui demonstrado. Parte-se da Lei de Ampère-Maxwell, onde o fluxo elétrico através de uma superfície aberta é
.

Como todas as integrais acima são integrais de superfície, conclui-se que seus integrandos são iguais, logo
.

Conclui-se, assim, a dedução das equações de Maxwell na forma diferencial.
Notas
- ↑ Olivier Darrigol, Electrodynamics from Ampere to Einstein, p. 146,ISBN 0-19-850593-0 Oxford (2000)
- ↑ Spivak (1965), p. vii, Prefácio.
- ↑ Entre os matemáticos este fato é conhecido, então o circulo é redundante e frequentemente deixado de lado. No entanto, deve-se ter em mente aqui que em termodinâmica, onde frequentemente aparecem expressões como (em que a derivada total, ver abaixo, não deve ser misturada com a derivada exterior), o caminho de integração W é uma linha unidimensional fechada em uma variedade de dimensão bem maior. Isto é, em aplicações termodinâmicas, onde U é uma função da temperatura , o volume e a polarização elétrica da amostra, tem-se e o circulo é realmente necessário, por exemplo se for consideradas as consequências diferenciais do postulado da integral






Referências
- Anton, Howard. Cálculo / Howard Anton, Irl Bivens, Stephen Davis; tradução Claus Ivo Doering. - 8. ed. - Porto Alegre: Bookman, 2007. 2 v. (680; 672 p.): il.; 28cm.
- Spivak, Michael (1965), Calculus on Manifolds: A Modern Approach to Classical Theorems of Advanced Calculus, ISBN 978-0-8053-9021-6, HarperCollins
- Strauch, Irene (2008), Análise Vetorial em dez aulas, Departamento de Matemática Pura e Aplicada, Instituto de Matemática - UFRGS.











